Here is a new video of another flight in my Hubsan H107CHD Quadcopter.
Weather was overcast with a little wind. I took it up a bit higher this time and got some nice views.
Here is a new video of another flight in my Hubsan H107CHD Quadcopter.
Weather was overcast with a little wind. I took it up a bit higher this time and got some nice views.
Here is another video of my new x4 quadcopter with HD camera.
This time the weather was much better but was still a bit too windy to take it too high up.
The image quality from the camera on this copter is much better than my previous custom jobs with keyring cameras.
I finished building my robot today. It was a comparatively quick build compared to RC and model kits I am used to making.
I will make a full post of the build and the technology behind it later but for now here is a video of me calibrating the servos that control the robots head.
I needed to find the right values in order to make sure the robot looks where I want it to.
The robot uses a Seeeduino which is an Arduino compatible controller board and has ultra sonic sensors for eyes.
I have always had an interest in robotics but never really gone out of my way to find myself a kit to get started. I recently thought about trying to build some sort of quad copter with A.I. but it could prove costly if the thing kept falling out of the sky or flew away.
Therefore I decided that a land robot would be preferable.
Here I have a kit I ordered from a robotics company I found in the back of a Linux magazine.

It comes with a tracked chassis and all of the electronic components required to build and program a robot that will use ultra sonic sensors to scan its surroundings.
Its exciting as I will be able to write the A.I. for the robot and improve on it to make it more intelligent.
I also have the option of adding additional circuit boards to the robot to add functions such as light and sound.
I will not be using the Raspberry Pi with it right away but I do have the option of integrating it in the future if I need to expand its functions.

Here is finished model with body shell fitted. I still want to add some sponsor stickers at some point but this is it with most of the Tamiya stickers applied.
I am not a fan of the Stickers that come with Tamiya body shells especially the ones for the windows.
I have not given the model a proper test outside yet but in the quick go I did have with it I noticed the motor is too much for the wheelie bar. Full throttle will put the truck on its roof almost instantly.
I found the sweet spot for wheeling was around 80% throttle.
After landing a wheelie you can then apply full throttle to speed up as the front will not lift again until you slow down.
Over the last few evenings I finally got round to building the Volkswagen Wheelie Camper that I got in the Modelzone closing down sale.
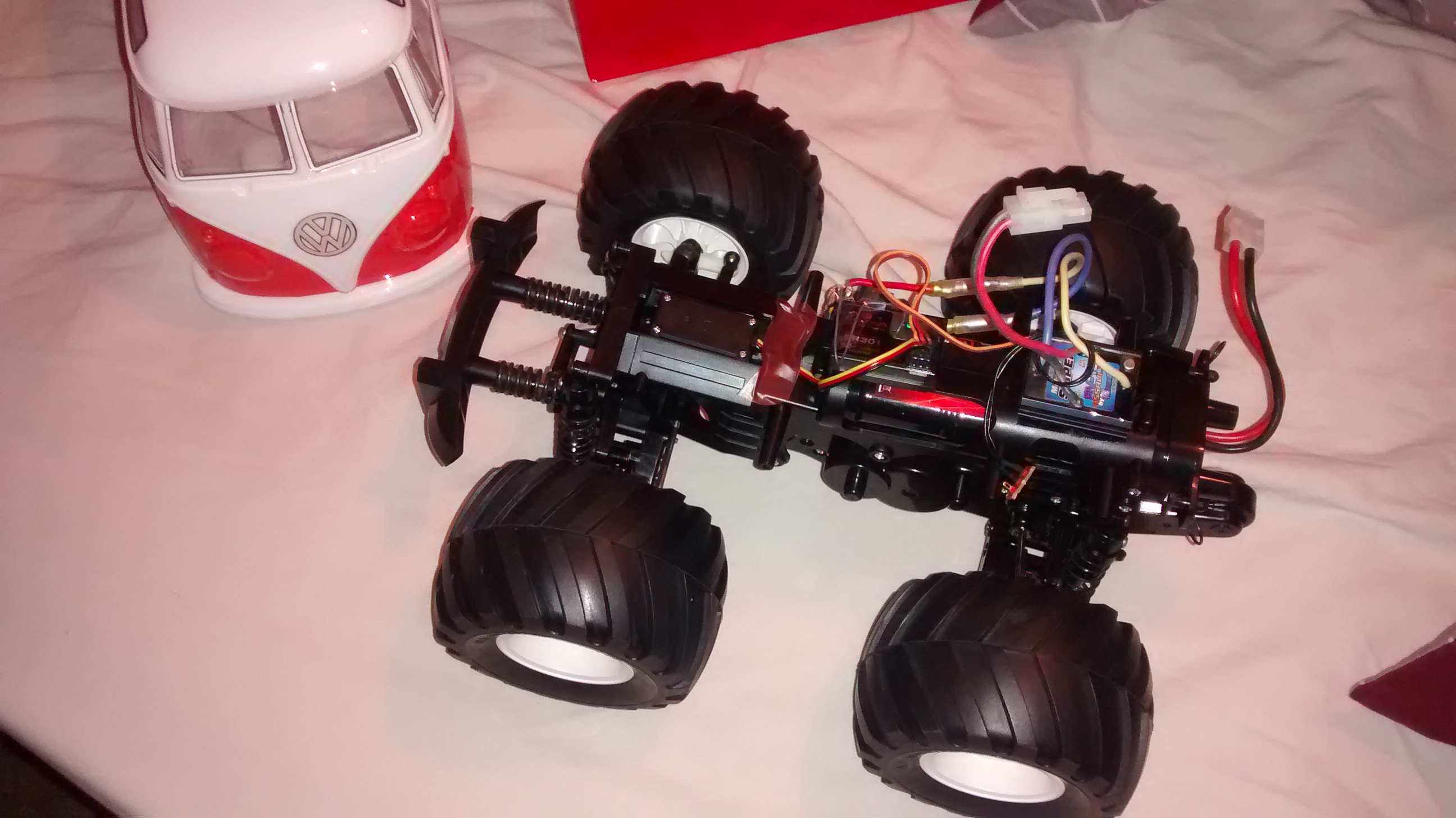
The Car is complete except the body post mounts and the stickers on the bodyshell.
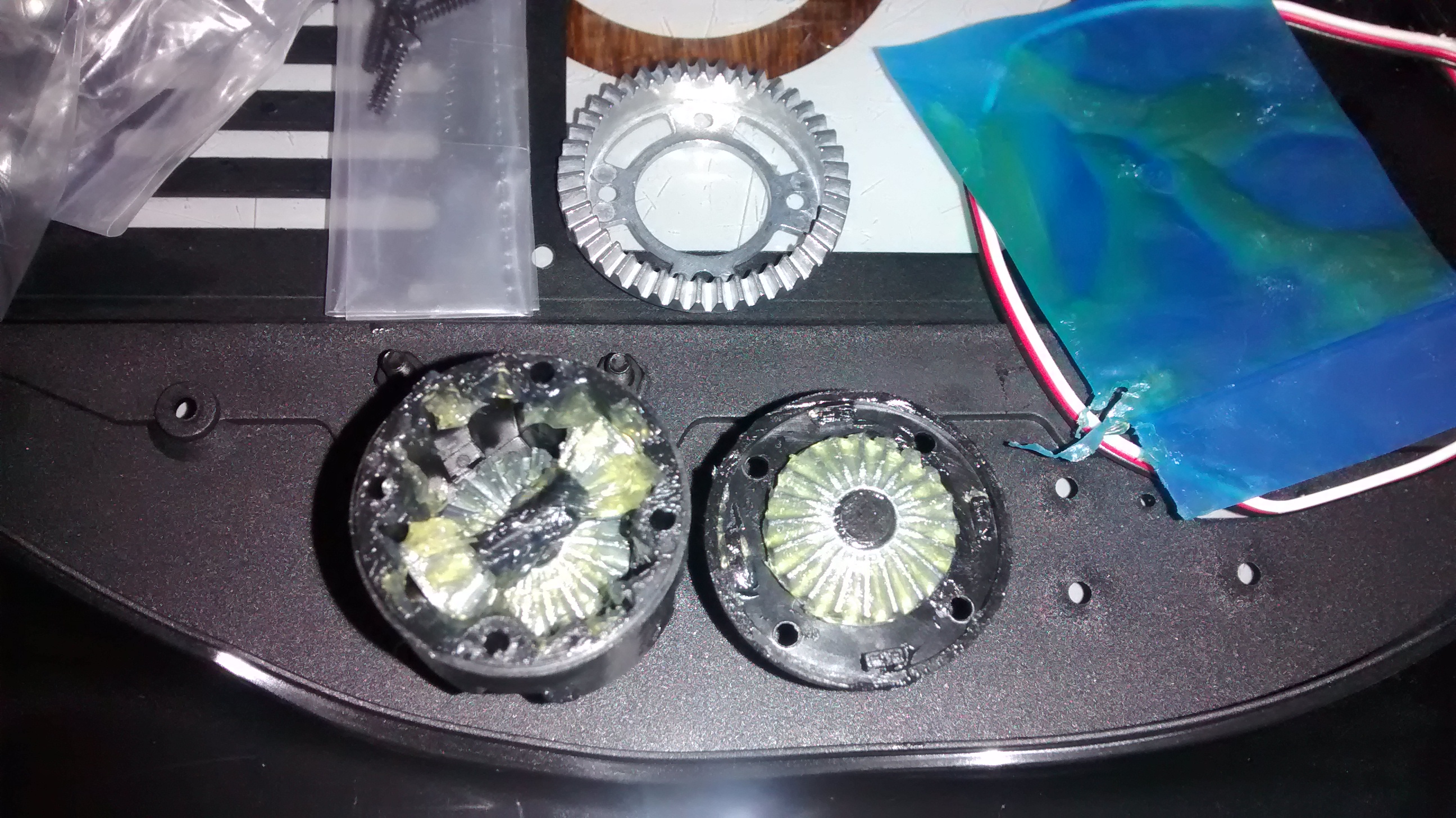
I have replaced all bearings and bushings with ball race bearings and upgraded the motor to a 12×2. This of course also required a different ESC as well.
I gave it a Spektrum splash proof receiver as Spektrum is the only radio technology I use if I can help it. This means I can bind and control all my models from a single transmitter.
Tamiya were a bit cheeky with this kit as it said it included a ball race option pack but there were not enough bearings to go around. Luckily I have a bag of them so this was not an issue.
I made the mistake of giving this a quick test indoors. This lead to it hoping off the spot doing a back flip and smashing the on/off switch.
To fix this I had to solder the wires together where the switch once existed.
I think I will finish mounting the shell before playing with it anymore!
I just got round to bringing my Hyper 7 back into action. The pull starter stopped working a couple of months back so I have fitted a new one.

I checked the condition of the old start when I removed it as sometimes you can repair them but in this case it had snapped.

Usually pull starters can be a bit of a pain to replace because it either means removing a lot of parts to get to it or removing the engine itself. I managed to cheat a bit and just remove the rear diff and wheels.

I had a bit of trouble testing my car after as it didn’t want to start in the cold but the hair dryer trick solved the problem.

I recorded a short video while driving with one hand of the buggy back in action.
I have started working on my E Gemini hovercraft.

Most of the plastic pieces have been trimmed and the electronics tray has been mounted into the hull with silicon.
I have soldered the my connectors for the esc and battery pack replacing the Tamiya connector on the battery with a deans one.
I chose to use a specktrum receiver in the hovercraft as it means I can use the same transmitter as I use on my cars. I have tested the electronics and everything is working perfectly.
Next I need to trim down the lower hull and start working on the rear of the craft.











I have caught up with my RB7 subscription and built everything up to issue 44.
I decided to put aside recent issues until I had enough to finish and cover the differential instead of having to leave half finished bits on the side.
In this session I built and fitted the rear differential, differential housing and the rear suspension arms.