
Here I am building the Airfix SR-N1 hovercraft.
According to the box I have and the internet this is the 1973 release making it by far the oldest kit I have ever brought and made. The kit itself does not have many parts but due to its age and condition it was not the easiest build.


I started by putting the chassis together and the associated parts that were all to be painted aluminium. I had to use a fair amount of model filler to fill the gaps between the bottom and top of the chassis. This was then spray painted.

The parts to be painted blue were sprayed and test fitted to the model.

The window screen is glued onto the cockpit and parts of it are hand painted blue. This was the worst part of the kit. Neither part lined up and the cockpit was damaged. I had to use a mixture of cutting, filling and sanding to get these parts to glue nicely together.
The duct is painted white and attached to the top of the lift chamber.

The crew are painted and added glued to their seats. They both have life jackets, helmets and masks.

The supporting posts and roof are glued into place completing the cockpit.

The decals were very yellow so I used the old trick of leaving them on by a window for a few days so that the light whitens them.

This is how they looked after a few days in the sun.

Next I started to apply the decals to the rudders, these were tricky as the decals were larger than the rudders meaning they either had to overlap of have the excess cut off.

The hovercraft with rudder decals and cockpit decal applied. The exhaust is painted black and the fire extinguishers are painted gold.

All decals have now been applied and the frame of the cockpit window has been hand painted blue.






































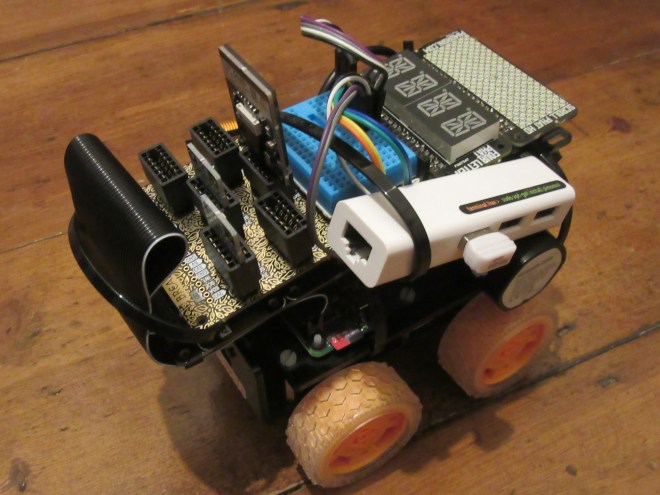 So first I added the phat stack with the breakout garden hat, explorer (motor) phat, four letter phat and a scroll phat HD. For convenience I also attached USB hub / Ethernet adapter. This makes it easier to work on the PI if there are any Wifi issues.
So first I added the phat stack with the breakout garden hat, explorer (motor) phat, four letter phat and a scroll phat HD. For convenience I also attached USB hub / Ethernet adapter. This makes it easier to work on the PI if there are any Wifi issues.
