
The Micro:bit is a tiny computer designed by the BBC for educating children in computing.
You may think there is not much point in using the Micro:bit for robotics when there is the Raspberry PI and Arduino available but there is beauty in its simplicity.
Much like the Arduino you flash it with some code and it will run it until you flash it again. There are plenty of tutorials and different languages to use making it very quick and easy to work with. There are even block programming editors.
Recently I got my hands on a second Micro:bit so I thought I would have a go at Bluetooth communication between them having one as a transmitter to control a robot powered by the other.
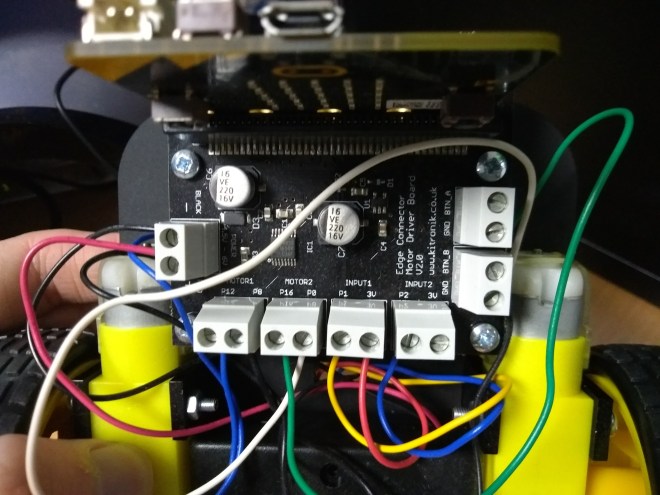
The robot kit I have here is the Kitronik line follower buggy. It uses a motor driver edge connector board to drive the motor and monitor inputs. The board is nicely labeled so that you can see which pins you needs to write to in order to control the motors.
Most of the editors for the Micro:bit are online only but I have found an offline Python editor called Mu that can be used and is my environment of choice. For this project though I decided to use Microsoft’s Javascript/block editor. Continue reading Micro:bit – Micro:bit Bluetooth robot

